1. 基础:
三轴六余度的通用标准:
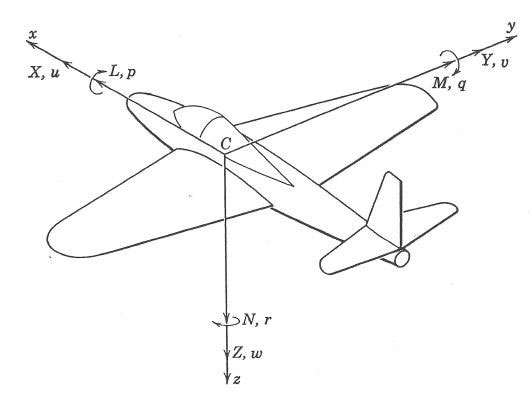
首先大家要记住这个图,这将是贯穿始终最重要的一个图,后边简单讲到气动导数的时候会再用到。
这图代表了三轴6个余度(或DOF,自由度), 前后,左右,上下 (x,y,z)三条轴向以及绕轴旋转的余度. 记住图中箭头的方向代表了正值的方向(可能跟你学过的直角坐标系正好相反!)
| 轴 | 扰动力 | 平均速度 | 扰动速度 | 旋转角 | 角速度 | 转动惯量 | 滚转力矩 |
|
x
|
X(推力,阻力的变化量)
|
U前后水平速度
|
u
|
φ滚转角
|
p滚转速度
|
A
|
L
|
|
y
|
Y(侧向力变化量,比如蹬舵,侧风)
|
V垂直于中线侧滑速度
|
v
|
θ俯仰角
|
q俯仰速度
|
B
|
M
|
|
z
|
Z(升力变化量
|
W垂直机身
|
w
|
ψ侧
|
r侧滑
|
C
|
N
|
|
可以通俗理解为让飞机
改变正常状态"突然"施加 或者产生的力(变化量) |
指正常飞行时的速度值
|
可以通俗理解为让飞机
改变正常状态"突然"改变 的速度(变化量) |
理解为
三个轴上的 滚转惯性 |
导致滚转
的力矩 |
静稳定性的概念:
理解这个,有一颗吃货的心就好懂了:首先你有一个碗,碗里有一颗鸡蛋你左摇右晃这个碗,放下碗后鸡蛋还是要回到碗底. 或者说,鸡蛋在受到扰动后会有自然想回到碗底的趋势.这就是静态稳定性啦.
反之,鸡蛋立在西瓜上,这就是静不稳,虽然也能配平!飞机也是哦. 但是以稍微一扰动,他就离稳定状态越来越远了,pia唧一声,你就只能吃荷包蛋了....鸡蛋放在菜板上,这叫中立稳定: 我推它一下,它就停在新的地方.没有想回或者想离开的趋势... 换句话说任何地方都能配平!
动态稳定性:
鸡蛋每次都会想往碗中心滚这叫做静稳, 因为摩擦力,每次左摇右晃的幅度越来越小,越来越趋近于在碗底静止这叫做动态稳定.
假设理想状态下碗和鸡蛋没有摩擦力,没有空气阻力,你会看到鸡蛋会一直保持左摇右晃下去不衰减,这叫静稳+动态中立.
假设碗底有个吹风的喷口,每次越过碗底都会增加向另一边的运动幅度,摆动越来越大,但是每次都还想回到碗底,这叫做静态稳定+动态不稳定.
阻尼系统
跟弹簧不一样,阻尼系统的阻力是与速度相关的. 弹簧的压力是跟位移有关,压缩距离越大,弹力越大,但(理想弹簧)本身不消耗能量.但阻尼系统是运动速度越大,阻力越大,系统会消耗能量.
俯仰/偏航阻尼, 回想鸡蛋的问题,不管是在碗里,板上还是西瓜上,我们用一层厚厚的粘稠的糖浆包裹起来,虽然鸡蛋还是要回到原来中立位置/停在新的位置/离中立越来越远,但是明显的他们变化的速度会变慢,这有啥用呢?
比如碗里的状态, 原来的鸡蛋就算想回到碗底,也很可能会越过,并来回滚好几次,但有糖浆后很可能只越过一次,甚至不越过,就可以回到原位了. (静态稳定+动态十分稳定)
当然糖浆太浓(阻尼太大)会严重减慢鸡蛋回去的速度.从系统控制理论来说,鸡蛋稍稍越过原位(峰值位移的2-5%左右),得到的是一个比较迅速和稳定的状态.另外,即使是西瓜上立鸡蛋的状态,因为糖浆(阻尼)会大大减缓鸡蛋离开平衡点的速度,我们的反应时间就足够滚动或者移动西瓜来重新控制鸡蛋了.也就是说,适当的俯仰阻尼设置可以让我们手动飞静不稳的飞机!! 当然这只是静不稳的一半问题,静不稳还有更严重的问题没解决.
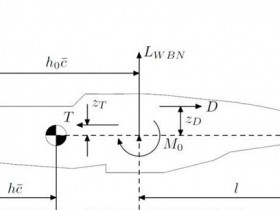
平飞的概念:
简单来说平飞就是飞机六个余度的所有力和力矩相等,飞机对称的话我们省略掉对称轴的东西,比如滚转和侧滑。那么基本上来说就是:
升力=重力 L=W;
推力=阻力 T=D;
最重要的:
抬头力矩=低头力矩 M=0.
听起来太简单了,但这三个等式将是我们设计飞机时最重要的参照.
升力系数, 阻力系数
升力系数 Cl= L/ (1/2*ρ*V^2*S);
阻力系数 Cd= D/ (1/2*ρ*V^2*S);
升力和阻力系数是将升力和阻力除以动压以及翼面积以消除单位来帮助理解和运算的量。因为和单位无关,所以分析问题时可以脱离大小,速度,高度等情形的限制.详细的后面讲